Next: Camera calibration Up: Anatomy of a projective Previous: The Principal axis and
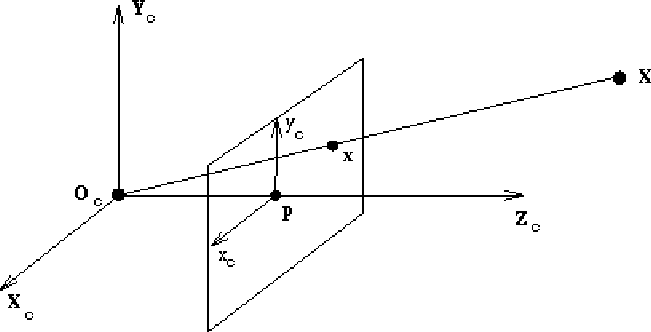
![$\displaystyle \left[
\begin{array}{c}
x_c \\ y_c \\ f
\end{array}\right]
=
k
\left[
\begin{array}{c}
X_c \\ Y_c \\ Z_c
\end{array}\right]
$](img310.png)
where
![$\displaystyle \left[ \begin{array}{c}x_c \\ y_c \\ f \end{array} \right] =
\lef...
...ray} \right]
\left[ \begin{array}{c}X_c \\ Y_c \\ Z_c \\ 1 \end{array} \right]
$](img312.png)
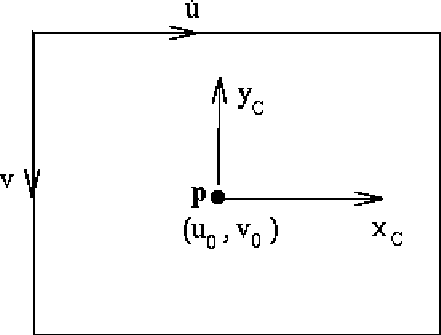
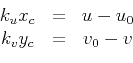
where the unit of
![$\displaystyle \left[ \begin{array}{c}u \\ v \\ 1 \end{array} \right] =
\left[ \...
...} \right]
=
{\bf C} \left[ \begin{array}{c}x_c \\ y_c \\ f \end{array} \right]
$](img316.png)
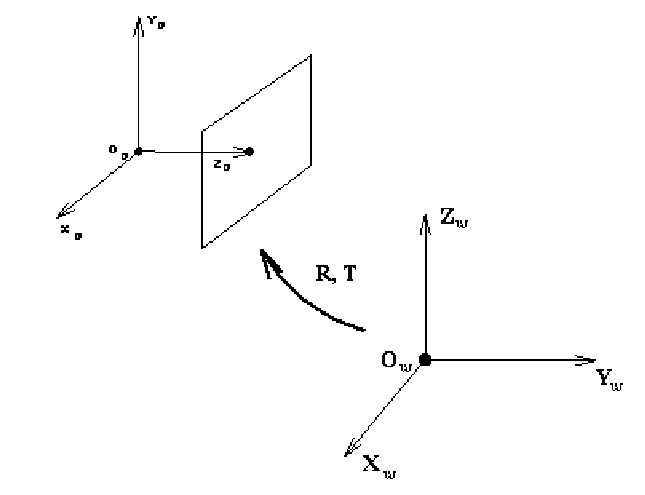
The Euclidean transformation between the camera and world coordinates is:
and is expressed projectively as:
![$\displaystyle \left[ \begin{array}{c}X_c \\ Y_c \\ Z_c \\ 1 \end{array} \right]...
...rray}\right]
\left[ \begin{array}{c}X_w \\ Y_w \\ Z_w \\ 1 \end{array} \right]
$](img319.png)
Finally, concatenating the three matrices, we have
![$\displaystyle \left[ \begin{array}{c}u \\ v \\ 1 \end{array} \right] =
{\bf C}\...
...f T} \right]
\left[ \begin{array}{c}X_w \\ Y_w \\ Z_w \\ 1 \end{array} \right]
$](img320.png)
which defines the